Gli stabilizzatori parallelo (o shunt)
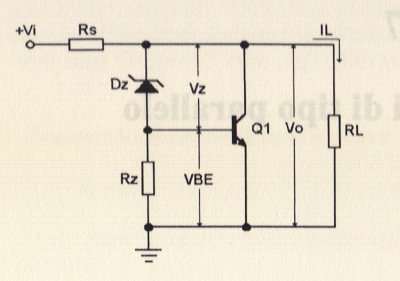
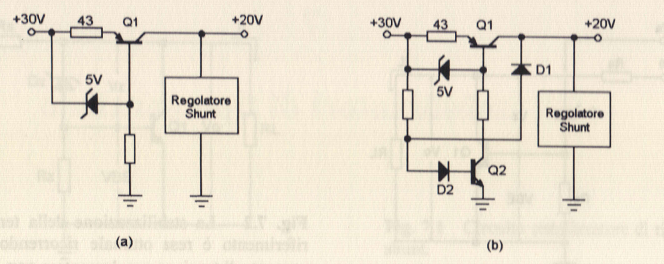
Gli stadi stabilizzatori in parallelo derivano da una combinazione di uno stabilizzatore con diodo zener con un amplificatore di corrente a BJT. La figura ne fomisce un esempio.
ll funzionamento del circuito é del tutto simile a quello realizzato con il solo
diodo zener. La tensione Vi di ingresso é, infatti, applicata al carico tramite la resistenza Rs. Su questa resistenza si manifesta una caduta di tensione che dipende esclusivamente dallo stato di conduzione del BJT regolatore Q1. Se, per esempio, la tensione Vo di uscita aumenta (o per un incremento della tensione di ingresso o per un minore assorbimento di corrente da parte del carico), si ha un aumento della tensione Vbe fra base ed emettitore del BJT che ne fa aumentare la conduzione.
L’incremento della corrente di collettore che cosi ha luogo determina una maggiore caduta di tensione sulla resistenza Rs tale da riportare la Vo al suo valore nominale.
Essendo infatti:
Vi = VRs + Vo
e quindi anche:
Vo = Vi – Vrs
Poiché l’incremento della Vi viene immediatamente compensato dal corrispondente incremento della caduta di tensione sulla resistenza Rs ne consegue che la tensione di uscita rimane costante.
ll calcolo dei componenti di uno stadio stabilizzatore di tipo serie si esaurisce nel
dimensionamento delle resistenze Rs e Rz per le quali si hanno le espressioni:
Tenendo conto che la tensione Vo é data dall’espressione
Vo = Vz + Vbe
il diodo zener andrà scelto per una tensione
Vz = Vo – Vbe
E per una potenza
Pdz = Vz * Iz ≅ Vo * Ib
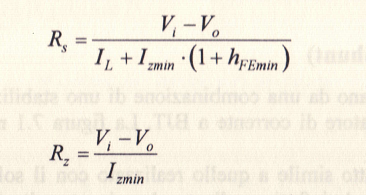
L’eguaglianza (Vz – Iz) ≅ (Vz * Ib) si giustifica tenendo conto che il diodo zener è normalmente percorso dalla corrente Ib, di base del BJT che assume il valore massimo in corrispondenza del valore minimo della corrente di carico e del valore massimo della tensione di ingresso. E pertanto necessario che la corrente di base del BJT non superi il limite imposto per la corrente Iz nel diodo zener. Per questo motivo, data la sempre possibile fluttuazione della Ib quando si richiede un comportamento ottimale dell’alimentatore di tipo parallelo é buona norma adottare la configurazione di cui alla figura che differisce dalla precedente solo perché il punto di lavoro del diodo zener é fissato da una tensione indipendente Va maggiore del più alto valore che può assumere Ia tensione di ingresso Vi.
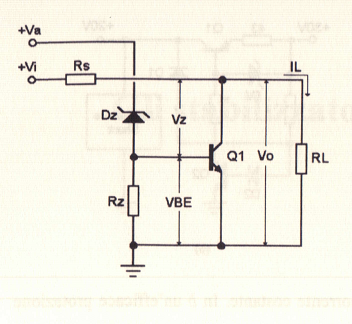
Un’altra soluzione consiste nell’utilizzare al posto del singolo BJT Q1 una combinazione di due o più BJT disposti in Darlington cosi come mostra la figura Va comunque osservato che gli stadi stabilizzatori di tipo parallelo trovano un impiego limitato poiché, per le loro particolari caratteristiche, possono presentare un buon comportamento, stabile e di accettabile affidabilità, solo quando siano da alimentarsi carichi costanti e per piccoli valori della potenza in gioco. L’unico vantaggio che presentano nei confronti dei regolatori di tipo serie risiede nella quasi assoluta impossibilità di danneggiamento del BJT regolatore anche nel caso
si manifesti in uscita un cortocircuito prolungato.
Stabilizzatori di tipo shunt a basso ripple
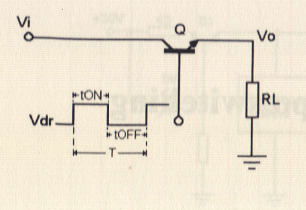
In a stabilizzatore-shunt con generatore di corrente costante. In b un’efficace protezione realizzata con un BJT, due resistenze e due diodi.
La figura a mostra un circuito cui si fa spesso riferimento quando é richiesta una migliore regolazione nei confronti delle possibili fluttuazioni della Vi di ingresso e/o un valore particolarmente basso del ripple.
II blocco “regolatore-shunt” della figura a può anche essere soltanto un diodo zener o un circuito piu complesso a piu componenti attivi del tipo esaminato nel paragrafo precedente. Poiché il BJT Q1 realizza un generatore di corrente costante Il = 100 mA, nell’ipotesi che sia, per esempio, Vi = 30 V e Vo = 20 V lo stesso BJT per R = 43 Ω , dissiperà, nel normale funzionamento, la potenza:
Pq1 = [Vi – (R * Il ) – Vo] * Il =[30 – 4,3 – 20] * 0,1 = 0,57 W
Ma se l’uscita dovesse andare in cortocircuito, la potenza assumerebbe il valore:
Pq1 = (30 – 4,3) * 0,1 = 2,57 W
Nel passaggio dal normale funzionamento alla condizione di cortocircuito si ha penanto una dissipazione di potenza piu che quadrupla.
Per ovviare a questo inconveniente, che suggerirebbe di adottare per Q1 un BJT di potenza dotato di opportuno radiatore (pur con una normale corrente di carico di soli
0,1 A), si può ricorrere al circuito della figura b In questo, il diodo D1, nel caso l’uscita andasse in cortocircuito, porterebbe a massa l’anodo del diodo D2 interdicendo il BJT Q2 normalmente in saturazione. ll passaggio dallo stato di saturazione allo stato di interdizione del BJT Q2 determinerà l’interdizione anche del BJT Q1 che pertanto può essere scelto in funzione delle caratteristiche richieste nel normale funzionamento (ossia, nell’esempio su riportato, per una potenza di 0,6 W).
Gli stabilizzatori di tipo switching
Negli stadi stabilizzatori fin qui presi in esame, il BJT in serie al carico lavora nella zona attiva della sua caratteristica e con una tensione di collettore pari alla Vi di ingresso che é sempre maggiore della tensione Vo di uscita. La differenza (Vi – Vo) indica la caduta di tensione ai capi del BJT che pertanto, indicata con Ic la corrente di collettore pressoché coincidente con Ia corrente Il, di carico, dissipa la potenza:
Pq = (Vi – Vo) * Ic = Vce * Ic
Questa potenza é in genere significativa e conduce ad un’efficienza di conversione intesa come rapporto fra la potenza in ingresso e la potenza in uscita in genere non superiore al 50 %.
Negli stadi stabilizzatori di tipo switching, al contrario, il BJT lavora come
interruttore passando altemativamente dallo stato di saturazione (ON) allo stato di interdizione (OFF) e viceversa. Commutando da ON in OFF e da OFF in ON il BJT dissipa comunque una potenza esigua. Essendo, infatti:
Pq = Vce(sat) * Ic
nello stato ON di saturazione del BJT la relativa tensione collettore emettitore Vce(sat) é minima (dell’ordine di alcuni decimi di volt), mentre nello stato OFF é
praticamente nulla Ia corrente Ic di collettore. In entrambi gli stati quindi la
potenza Pq espressa é minima.
L’efficienza di questi stabilizzatori é cosi elevata – anche maggiore del 90 % –
che si può lecitamente ritenere che Ia potenza impegnata in ingresso venga
praticamente trasferita in uscita con perdite trascurabili.
Nei rcgolatori switching il BJT, comandato da opportuni impulsi Vdr lavora alternativamente in saturazione e in interdizione
rendendo minima la dissipazione di potenza.
Un altro vantaggio delle configurazioni switching risiede nalla possibilità di realizzare sia circuiti stabilizzatori di tipo step-down (o buck), ovvero stadi la cui tensione di uscita é minore della tensione di ingresso, sia stabilizzatori di tipo step-up (o boost), ovvero stadi in cui la tensione di uscita e più elevata della tensione di ingresso, sia stadi inverting (o buck-boost) nel quali la tensione di uscita e di polarità opposta rispetto alla polaritia della tensione applicata, sia stadi di Cuk che consentono di ottenere una tensione Vo di uscita sia eguale che maggiore che minore che di segno opposto rispetto alla tensione Vi di ingresso.
Un circuito estremamente semplificato, ma che rende chiaro il principio di funzionamento del BJT in serie al carico nei regolatori switching, e riportato nella figura dove un segnale opportuno qui, approssimativamente, un’onda quadra va a pilotare il BJT in serie al carico. Nel suo fronte di salita il segnale Vdr porta il BJT in saturazione, mentre nel suo fronte di discesa porta il medesimo in interdizione. Il segnale Vo di uscita saré pertanto un’onda quadra il cui valor medio dipenderà sia dalla frequenza, sia dal duty cycle δ del segnale pilota.
Ricordando che il duty cycle di un’onda quadra é dato dal rapporto fra l’estensione dell’intervallo TON e l’intero periodo T, ossia dal rapporto:
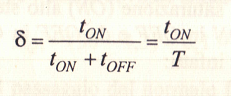
si comprende come il valor medio della tensione presente in uscita può essere modificato sia mantenendo costante il TON e variando la frequenza del segnale driver Vd nel senso che aumentando la frequenza (ossia contraendo il periodo) aumenta δ e quindi la sosta in saturazione del BJT sia variando la durata del TON mantenendo costante T. Anche in questo caso si ha la possibilità di modificare il
valor medio della tensione Vo dal momento che una maggiore o minore durata del TON determina una maggiore o minore permanenza in saturazione del BJT.
Quest’uItima tecnica necessita di un modulatore PWM (Pulse Width Modulator)
che altro non é che un circuito in grado di modificare la larghezza degli impulsi del segnale Vdr generato da un oscillatore.
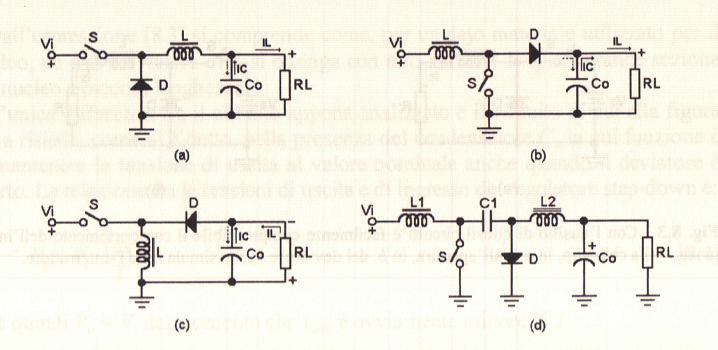
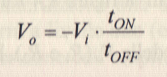
In a, b, c, e d rispettivamente, i circuiti che illustrano il principio di funzionamento dei regolatori step-down, step-up, inverter e di Cuk.
I circuiti step-down, step-up, inverer e di Cuk
La figura espone gli schemi di principio a cui puo essere ricondotto lo studio dei regolatori switching, spesso definiti DC/DC converter (ossia convertitori da continua a continua), rispettivamente di tipo step-down, step-up, inverter e infine lo schema di principio del regolatore di Cuk che, come si e già affermato, oltre ad una Vo minore, uguale o maggiore della Vi di ingresso, è in grado di fomire in uscita una tensione Vo dello stesso segno o di segno opposto rispetto alla stessa Vi.
II circuito step-down
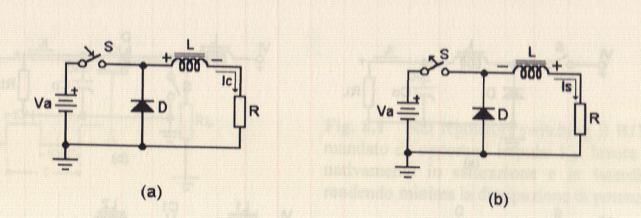
Con l’ausilio di questi circuiti é facilmente comprensibile il componamento dell’induttanza L alla chiusura, in a, e all’apertura, in b, del deviatore S, che simula il BJT-interruttore.
Lo schema a cui é riconducibile il regolatore step-down, che fomisce in uscita una tensione minore della tensione applicata in ingresso, e esposto nella figura a, ma, per il principio di funzionamento ci si riferisca ai circuiti riportati nella figura che, a meno del condensatore Co, sono identici.
Alla chiusura del deviatore S – figura a l’induttanza L si carica, con le
polarita indicate, in un tempo che é da cinque a sei volte la costante di tempo L/Rl, ll diodo in questo intervallo é completamento inattivo perché polarizzato inversamente. A carica avvenuta la corrente Ic vale Vi/Rl e l’energia immagazzinata dal componente ha quindi espressione:
All’apertura del deviatore figura b l’induttanza si scarica con le polarita
indicate mettendo in gioco la corrente Is che ha lo stesso verso della corrente Ic Ciò é possibile soltanto per la presenza del diodo che fomisce la via di scarica alla Is. ll diodo quindi fa in modo che sia durante la chiusura che durante l’apertura del deviatore la corrente nel carico Rl abbia sempre lo stesso verso.
Nei circuiti di cui alla figura il deviatore S simula il comportamento del BJT
in serie al carico.
Da un punto di vista pratico l’induttore L é il componente più critico dei regolatori switching e spesso é necessario realizzarlo dal momento che i valori di induttanza che derivano dai calcoli ben difficilmente trovano riscontro nei valori standard dei prodotti commerciali. Per Ia costruzione pratica si ricorre all’espressione:
dove:
L = induttanza in henry (H);
N = numero delle spire;
S = sezione, in metri, del nucleo;
μ = permeabilité del materiale costituente il nucleo;
μo = permeabilità dell’aria (12,6 * l0‾9 H/m);
L = lunghezza dell’induttore in metri.
Dall’espressione si comprende come, per un dato materiale utilizzato per il
nucleo, un elevato valore di L si ottenga con alto numero di spire, grande sezione del nucleo e piccola lunghezza.
L’unica differenza fra il circuito appena analizzato e il circuito di cui alla figura precedente a risiede, come si é detto, nella presenza del condensatore Co la cui funzione é di mantenere la tensione di uscita al valore nominale anche quando il deviatore é aperto. La relazione fra le tensioni di uscita e di ingresso del regolatore step-down é:
 ed é quindi Vo < Vi dal momento che TON é ovviamente minore di T.
ed é quindi Vo < Vi dal momento che TON é ovviamente minore di T.
ll circuito step-up
Fornisce una tensione Vo > Vi ll circuito di riferimento é riportato nella figura b Quando S é aperto la tensione ai capi del carico eguaglia la tensione Vi di ingresso. Si ha quindi Vo = Vi Quando S si chiude la corrente cincola soltanto in S e nell’induttanza L che si carica alla tensione Vi mentre Co provvede ad alimentare il carico. Alla riapertura di S Ia tensione indotta ai capi di L va quindi a sommarsi alla tensione Vi ai capi del carico che sarà pertanto sottoposto ad una tensione Vo > Vi.
La relazione fra le tensioni di uscita e di ingresso é:
ed é quindi Vo > Vi dal momento che ION é ovviamente minore di T.
ll circuito inverter
Fomisce una tensione Vo di segno opposto a Vi ll circuito di riferimento é riponato nella figura precedente c.
II funzionamento é molto simile a quello del regolatore step-up. Quando il
deviatore é chiuso il diodo D isola l’ingresso dal carico Rl che é alimentato
dall’energia immagazzinata nel condensatore Co. Con S chiuso l’induttanza L si carica. Quando il deviatore si apre per l’inversione delle polarità della tensione ai capi di L la corrente fluisce nel carico secondo il verso indiato nella figura c La tensione Vo ha quindi polarità opposta rispetto alla Vi di ingresso.
La relazione fra le tensioni di uscita e di ingresso é:
La tensione di uscita é quindi sempre di segno opposto rispetto alla tensione di ingresso ma, in valore, può essere maggiore, eguale o minore della Vi a secondo
che sia TON maggiore, eguale o minore di TOFF.
Il circuito di Cuk
Fomisce una tensione Vo sia eguale che maggiore che minore e sia dello stesso segno che di segno opposto rispetto alla Vi. ll circuito di riferimento é riportato nella figura precedente d.
Gli stabilizzatori di tensione lineari a circuito integrato
La gamma degli stabilizzatori di tensione a circuito integrate e ormai vastissima e pertanto, nella stesura di un manuale di effettiva progettazione, é necessario eseguire delle scelte che, in quanto tali, determinano necessariamente delle esclusioni. Qui si é dato comunque il dovuto spazio ai circuiti integrati di più vasto impiego fornendo sia gli elementi utili alla comprensione più immediata della maggior parte dei regolatori a IC oggi in commercio, sia molteplici esempi per il
dimensionamento degli stessi.
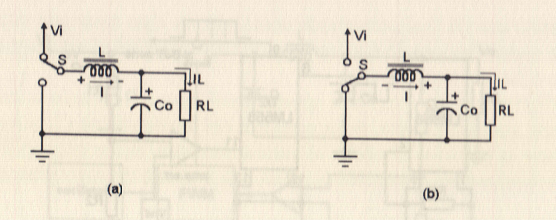
ll regolatore di tensione 723
Con sigle diverse (L123, pA723, LM723, TBA28l, ecc.) a secondo del costruttore, questo integrato, unitamente alla serie LM 100 della National, é fra i più usati particolarmente per la sua versatilita di impiego. La figura ne riporta lo schema a blocchi.
Valori massimi delle grandezze inerenti l’lC 723
Tensione continua da V+ a V – 40 V
(Vi – Vo) 40V
Corrente di uscita 150 mA
Tensione fra input n.inv. e V- + 8 V
Dissipazione di potenza 800 mW
Temperatura di funzionamento 0 + 70 °C
Temperatura ai terminali 300 °C
ll diodo D1 opportunamente compensate in temperatura, fornisce Ia tensione Vref di riferimento pari a 7,15 V. L’ampIificatore di errore, qui schematizzato col simbolo dell’amplificatore operazionale, é costituito da due BJT in configurazione differenziale. Di questo sono accessibili sia l’ingresso invertente (inv.) che l’ingresso non invenente (n. inv). ll BJT Q2 consente Ia protezione contro i sovraccarichi comportandosi, nella configurazione più usuale, come limitatore di corrente. Infatti, una resistenza Rsc da connettersi fra la base (current limit) e l’emettitore (current sense), essendo percorsa dalla stessa corrente richiamata dal
carico, limita la corrente fomita al valore:
Pertanto per la Rsc da disporre fra la base e l’emettitore del BJ T Q2 si ha:
La tabella riporta quindi gli absolute maximum ratings, ossia i valori massimi dei parametri da non superare nel normale funzionamento dell’lC.
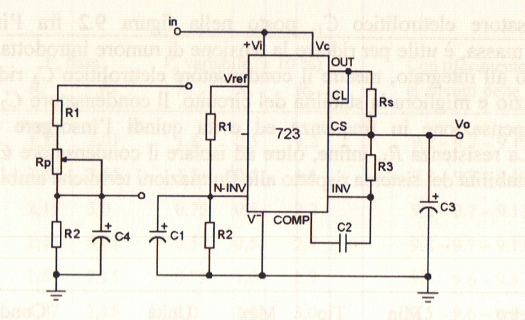
Circuito di base del regolatore integrato di tensione 723
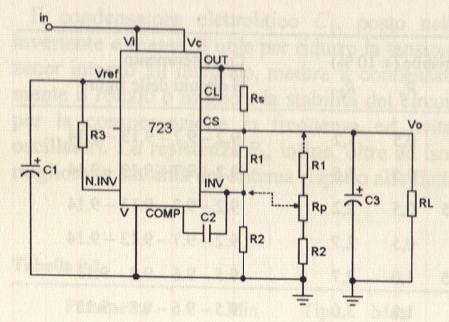
Regolatore con Vo variabile da 7 V a 30 V per una corrente massima di 100 mA.
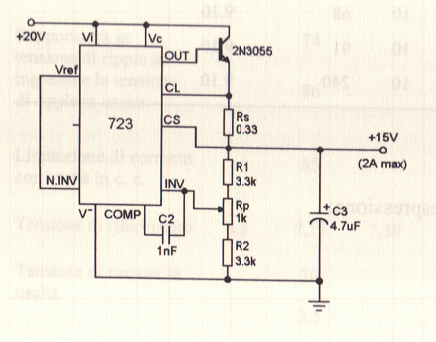
ll BJT 2N3055 consente di estendere la massima corrente erogabile dallo stadio.
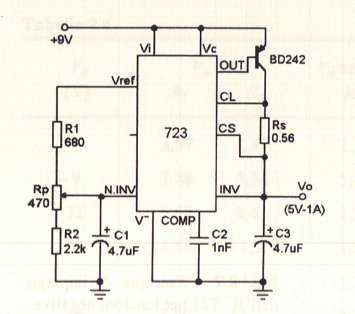
IL BJT booster é qui un pnp. Questa configurazione presenta un’ottima regolazione sia nei confronti del carico che delle fluttuazioni della tensione di linea.
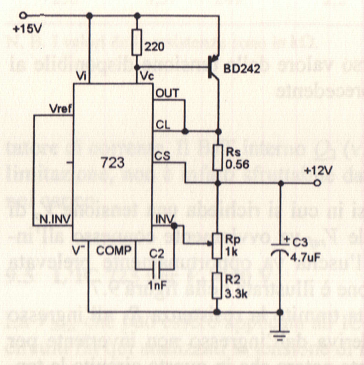
Regolatore con tensioni di uscita di 12 V per una corrente massima
di 1,2 A.
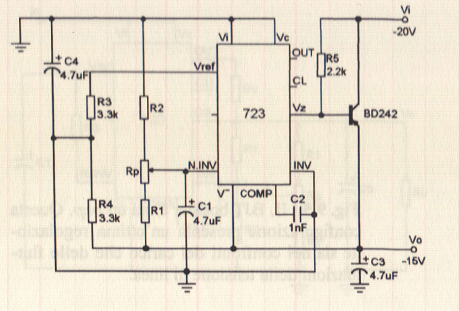
Esempio di impiego dell’lC 723 per tensioni negative.
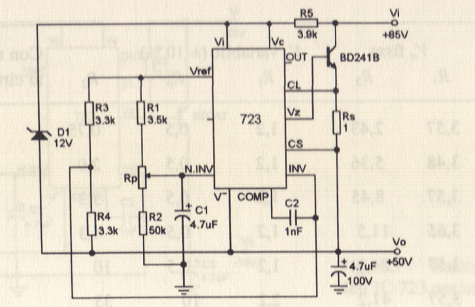
II diodo zener D1 avente Vz = I2 V consente di usare l’IC 723 per stabilizzare tensioni maggiori di 40 V. In questa configurazione si ha Vo = 50 V, Ilmax = 650 mA.
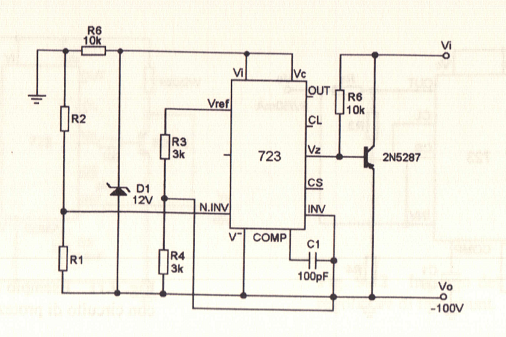
Simile al precedente, questo regolatore é adatto per la stabilizzazione di tensioni negative. Anche in questo caso, come per il regolatore di cui alla figura é la tensione di uscita che alimenta l’integrato.
Alimentatori da laboratorio con l’lC 723
Si illustrano qui tre alimentatori che si possono definire da laboratorio sia per le buone caratteristiche regolatrici sia per l’eccellente affidabilità, sia per la gamma di tensioni che sono in grado di ricoprire.
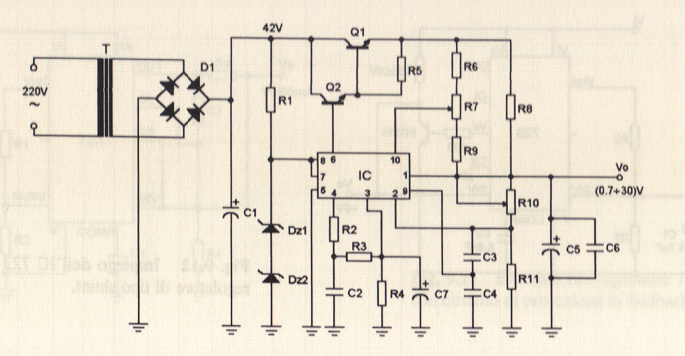
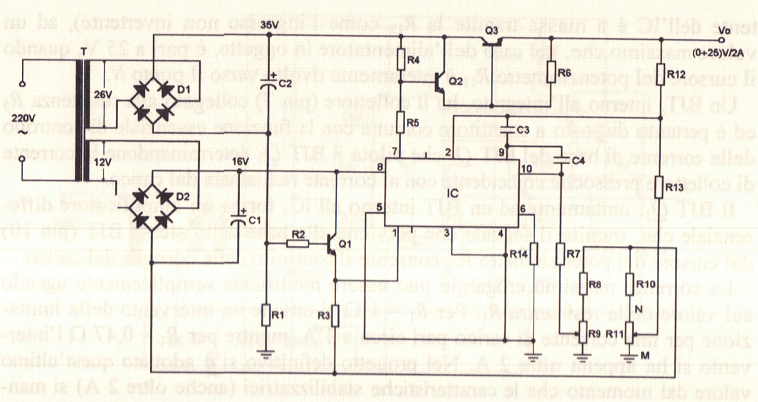
Alimentatore stabilizzato che fomisce una tensione di uscita variabile con continuita da 0,7 V a 30 V. La corrente massima é di 2 A.
Alimentatore stabilizzato con Vo variabile da 0,7 V a 30 V
Il primo alimentatore (1) – figura è in grado di fomire una tensione Vo di
uscita variabile con continuita fra 0,7 V e 30 V con una corrente massima di
carico di 2 A.
Lo schema elettrico e abbastanza semplice. Un trasformatore da 60 VA ha un secondario ai cui morsetti sono presenti 30 V(rms). Questa tensione raddrizzata dal ponte di Graetz D1 e filtrata dal condensatore elettrolitico C1 da 4700 pF/70VL, diviene pari a circa 42 V continui. La resistenza R1 limita la corrente nei diodi zener Dz1 e Dz2, necessari, questi ultimi, per l’alimentazione dell’lC 723 ad una tensione inferiore a 40 V. Essendo entrambi i diodi zener da 18 V di Vz (e della potenza di 1 W), la tensione Vi che penrviene ai terminale 7 e 8 deII’lC e pari a 36V.
Secondo lo schema classico del regolatore, fra i pin 4 (Vref) e massa, è disposto un partitore di tensione realizzato dalle resistenze R2, R3 e R4, portando cosiall’ingresso non-invertente (pin 3) l’estremo comune appunto, alla R3, alla R4 e all’elettrolitico C7.
I valori attribuiti alle su indicate resistenze hanno consentito di ottenere una tensione minima Vomin di 0,7 V.
Eventuali variazioni della tensione di uscita vengono riportate, attraverso il partitore R10-R11, all’ingresso invertente (pin 2) dell’amplificatore di errore intemo all’IC. L’uscita di questo (pin 6) pilota cosi in BJT driver Q2 che pilota il BJT Q1.
(1) Progetto dell’Autore gia presentato sulla rivista “Nuova Elettronica”, n. 31, anno 1974.
La presenza del driver e necessaria, come si é gia detto, per compensare il
basso guadagno di corrente che hanno in genere i BJT di potenza del tipo del ZN3055 (mediamente non superiore a 30).
La tensione stabilizzata Vo viene quindi variata con continuita da 0,7 V a 30 V per mezzo del potenziometro R10 il cui cursore fa capo, unitamente al suo
estremo superiore, al pin 1 dell’integrato. ll secondo potenziometro R7, il cui cursore fa capo al pin 10 (current limit) svolge la funzione di limitatore di corrente. Si noti, infatti, come il parallelo costituito dalla resistenza R8 con la serie (R6 + R7 + R9) abbia gli estremi connessi rispettivamente ai pin 1 e l0 secondo la classica disposizione circuitale atta a fonire la protezione a limitazione di corrente.
Per disporre in uscita di una corrente superiore a 2 A (per esempio, 4 A), oltre, ovviamente, ad adottare un idoneo trasformatore e un adeguato ponte a diodi, sara necessario disporre un altro BJT di potenza in parallelo al BJT Q1.
Per un funzionale e più efficace accoppiamento sarebbe pero necessario che entrambi i BJT di potenza avessero lo stesso guadagno di corrente, e cio imporrebbe una attenta selezione dei componenti. Per ovviare a cio é pero sufficiente disporre in serie a ogni emettitore una resistenza da 0,22 Ω (5 W per Ilmax = 4 A) secondo lo schema riportato nella figura. Questo artificio bilancia le correnti di collettore nei BJT in parallelo.
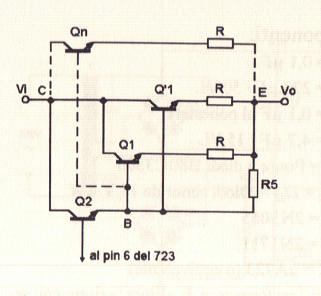
Per una corrente di carico maggiore di quella che può fomire il singolo BJT Q1, si possono disporre in parallelo più BJT ponendo in serie a ciascun emettitore una resistenza R dell’ordine di qualche decimo di ohm.
Le caratteristiche essenziali dell’alimentatore di cui alla figura sono:
V0 = (0,7 + 30) con continuita
Ilmax = 2 A
Corrente in assenza di carico (stand-by current) 20 mA
Regolazione di linea (ΔVi = 3 V) = 5 mV
Regolazione sul carico (ΔIl = 1 A) = 30 mV
Protezione a limitazione di corrente.
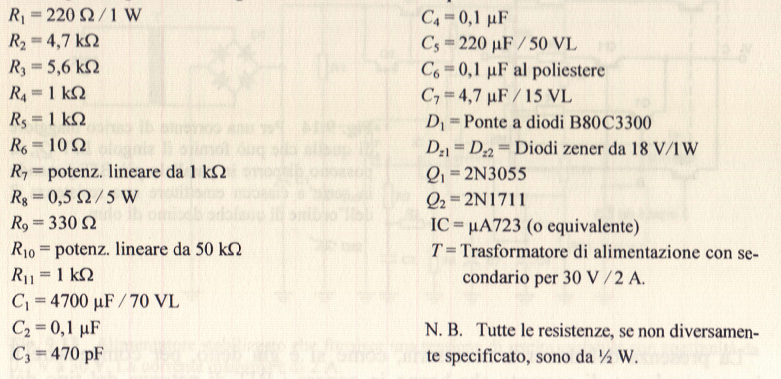
Si riporta quindi, di seguita, l’elenco dei componenti
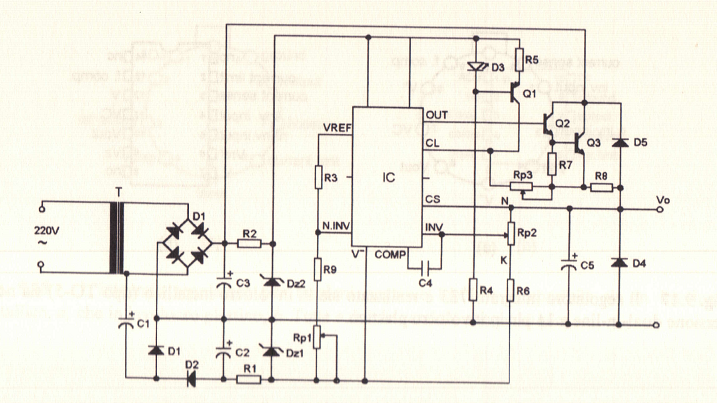
Alimentatore stabilizzato con Vo variabile da 0 V a 25 V
Alimentatore stabilizzato che fornisce una tensione di uscita variabile con continuità da 0 V a 25 V. La corrente massima è di 2 A.
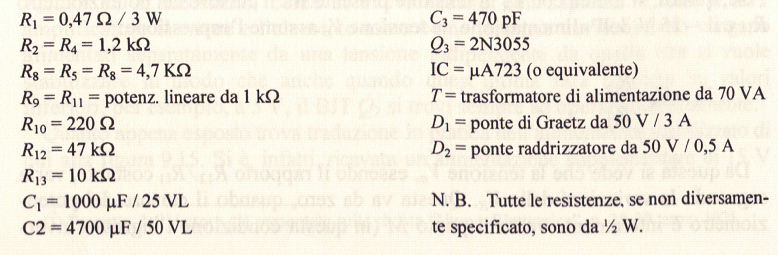
Si riporta quindi, di seguita, l’elenco dei componenti
(2) Progetto dell’Autore gia presentato sulla rivista “Nuova Elettronica”, n. 38-39 , anno 1975.
Alimentatore stabilizzato con Vo variabile da 0 V a 30 V
Alimentatore stabilizzato che fomisce una tensione di uscita variabile con continuità da 0 V a 30 V. La corrente massima è di 1 A.
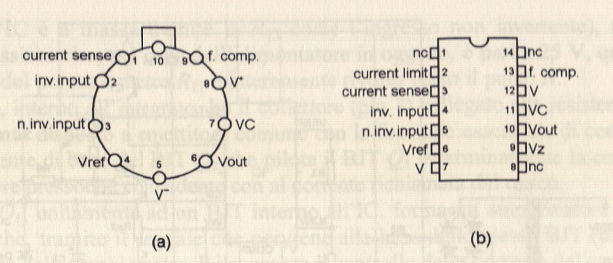
Il regolatore integrato 723 è realizzato sia in involucro metallico (tipo TO-5) sia nella versione dual-in-line a 14 pin in involucro plastico.
Osservazione
Come si può constatare dai circuiti stabilizzatori qui descritti, il regolatore integrato 723 – che in commercio è reperibile sia in involucro metallico a 10 pin sia in involucro plastico a 14 pin, come illustra la figura presenta una straordinaria versatilità e flessibilità di impiego.
Queste caratteristiche, unitamente all’affidabilità, lo hanno reso, fin dalla sua prima apparizione, integrato di punta nella realizzazione di un numero pressoché illimitato di stadi stabilizzatori di tensione sia di tipo lineare che di tipo switching. Questi ultimi trovano descrizione in un capitolo a parte, laddove vengono appunto trattati i regolatori in commutazione a circuito integrato.
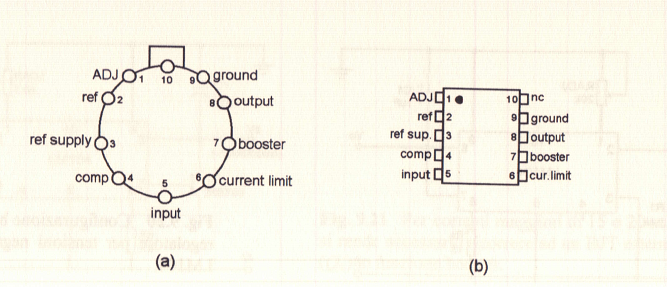
L`integrato regolatore per tensioni negative LM104 è reperibile sia in involucro metallico, a, che in involucro plastico, b. Tutte e due le versioni sono a 10 pin.
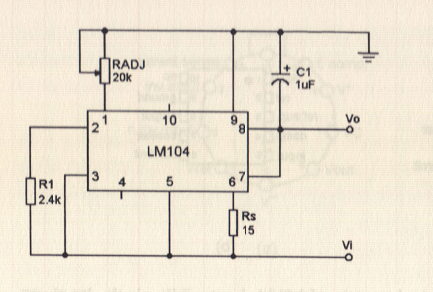
Configurazione base di un regolatore per tensioni negative con
LM104.
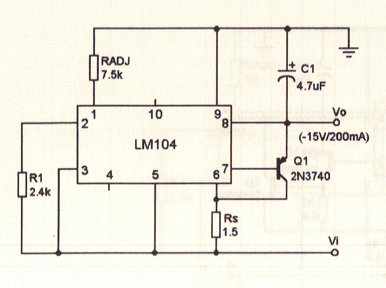
Per correnti di carico dell’ordine di 15 o 20 Ma si rende necessario ricorrere ad un BJT esterno (Q1) in funzione booster.
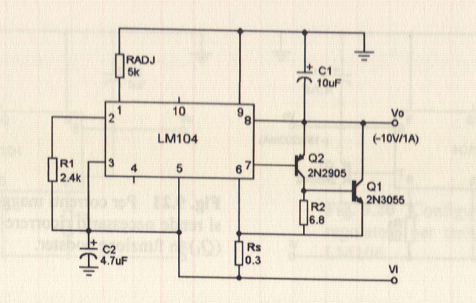
Per correnti di carico dell’ordine di 1 A o maggiori è necessario aggiungere un ulteriore BJT (Q2) atto a pilotare il BJT Q1.
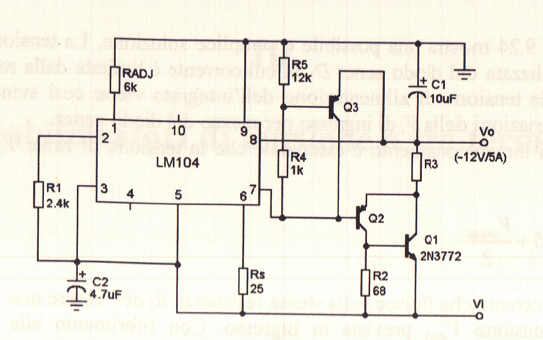
Configurazione circuitale dell’LM 104 che consente, tramite il BJT Q3, la protezione di tipo foldback dello stabilizzatore.
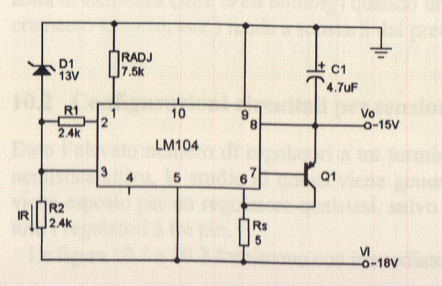
Il diodo zener D1 esplica la funzione di preregolatore.
Total Page Visits: 337 - Today Page Visits: 1