Come da presentazione siamo a proporvi un progetto veramente interessante delle sagome da softair , l’idea del Dummy Sensor viene dal bisogno di far pratica di allenamento di tiro oltre ad allenare riflessi e precisione , non vi preoccupate non serve una replica costosa il Dummy Sensor è molto versatile potete avere anche una replica economica lui si illuminerà come un albero di natale.
Come spiegato nei video il Dummy sensor sono delle sagome con 3 sensori, 1° situato sulla testa, 2° situato nel torace, 3° situato nella pancia, questi sensori non son da impatto ma ben si rilevano un suono/rumore, no no non è che se urlate il sensore rileva come se fosse un pallino ma per la precisione rileva un picco di frequenza dovuta dall’impatto del pallino, quindi scordatevi sensori da vibrazione o shock, ovviamente se colpito da qualsiasi cosa che sia un pallino o un cacciavite battere col dito ecc. per il sensore è un one shot one kill.
Questo picco di frequenza viene comparato con un trimmer soglia
cosi da evitare colpi troppo deboli, in effetti pallini oltre i 60 mt fa fatica a rilevarli, ma chi a una replica che tira a 60 mt, ci sono ci sono.
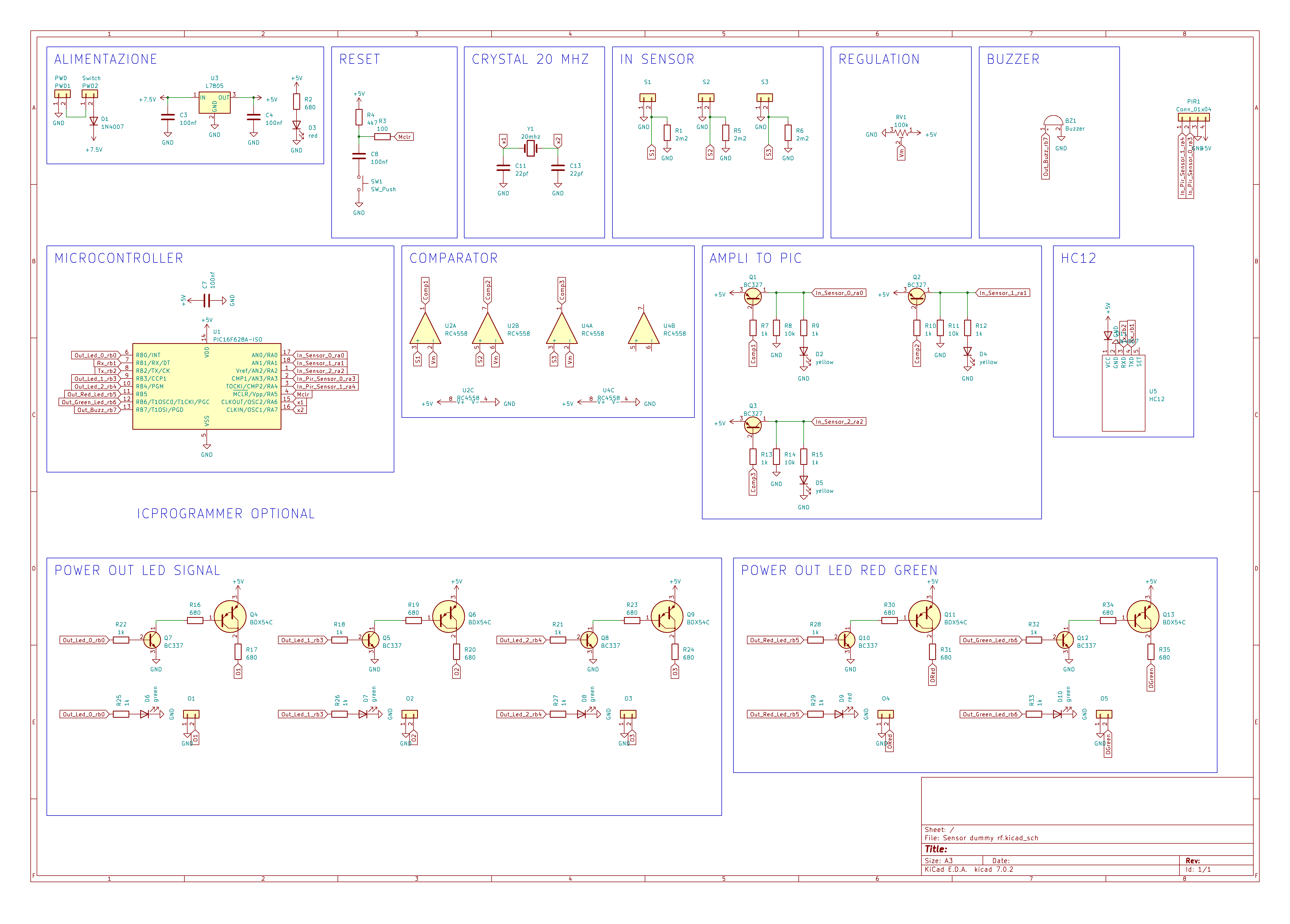
Dopo averlo comparato viene filtrato e amplificato, e sparato direttamente in un microcontrollore, che col dovuto firmware sarà passato ad un algoritmo che appositamente studiato per far si che filtri i vari rimbalzi dovuti alla frequenza ondulata e appunto ai vari picco di tensione/impulso che si verificano.
In sostanza il microcontrollore controlla i vari ingressi “3 per la precisione” in sequenza ad una velocita quarzo di 20 mhz quindi facendo due calcoli veloci veloci, questo microcontrollore utilizza un RISC avanzato rispetto ad altri microcontrollori a 8 bit (per essere un micro datato è ancora molto prestante), le istruzioni son processate da un solo ciclo di clock tranne per i sotto programmi che ne richiedono 2 cicli di clock, quindi nel firmware, struttura principale ci son 6 istruzioni per leggere i 3 ingressi , aggiungiamo l’interruzione di un Timer che interviene ad una frequenza di 9,537 hz con un minimo di 9 istruzioni ed un massimo di 17 istruzioni, ed un interrupt uart con 11 istruzioni, e un baudrate a 9600 con un massimo di 3 byte in ricezione quindi una latenza di 1,042 ms su byte totale 3,126 ms, questo da considerarsi solo se c’è la console attiva.
quindi:
6 istruzioni -> 1 ciclo
17x 9,537 istruzioni max -> 2 ciclo
11 istruzioni max -> 2 ciclo + 3,126 ms
Cicli Istruzioni di massima -> 353≈
20 mhz -> 20000000hz / 353 cicli = 56657 letture diviso 3,126 ms abbiamo 18124 letture totali diviso 3 sensori circa 6041 ≈ letture per singolo sensore trascurando deviazione del quarzo.
Questo quanto riguarda con console in trasmissione, altrimenti la normale lettura è:
6 istruzioni -> 1 ciclo
17x 9,537 istruzioni max -> 2 ciclo
Istruzioni di massima -> 331 ≈
20 mhz -> 20000000hz / 331 cicli = 60422 letture diviso 3 sensori circa 20140 letture totali diviso 3 sensori circa 6713 ≈ trascurando deviazione del quarzo.
Diciamo che una replica che spara a 6041 o 6713 pallini al secondo, be non vorrei mai trovarmi come obiettivo.
Questo è un calcolo abbastanza preciso e testato di quante volte i sensori vengono letti, c’è da aggiungere che se la soglia viene rilevata tale da far intervenire l’algoritmo di lettura, semplicemente viene interrotto il loop e inserendo un delay di 30 ms per la configurazione in Normal Mode, quindi 1000/30 circa 33,3 pallini al secondo di rilevamento, questo delay lo abbiamo testato da 5ms a 50ms, ma abbiamo deciso che tra 200 pallini e 20 pallini l’opzione ottimale era 33 trentini.
Detto questo è chiaro che il Dummy Sensor è molto prestante, oltre ai 3 sensori sulla circuiteria ci son presenti 2 sensori Pir (Sensori di movimento per capirci), tarabili da 5 a 20 mt, e con un ritardo da 1,2 secondi circa a 2 minuti.
Alleghiamo Datasheet del sensore Pir, questo non lo abbiamo inventato noi perché il costo tempo prezzo conveniva acquistarlo a circa 0,8€ al singolo pezzo, già pronto e completo.
Nella nostra configurazione il sensore Pir è stato tarato per la massima distanza e per il minor tempo di ON, ed a questo punto vi starete domandando perché tale sensore, ve lo spiego subito a cosa serve, funziona solo ed è utile solo se si è in possesso della console, che riferirà se è stato rilevata una presenza o no, mettiamo quindi in game allenamento è utile per capire se un giocatore se l’è presa comoda oppure no.
Le uscite son di potenza noi abbiamo collegato ad ogni uscita 4 Led Puntiforme alta Luminosità, ma è possibile collegarci anche altro, tensione uscita 5v max 1A il transistor BDx54c raggiunge potenze di uscita molto più elevate ma le piste del circuito non son state calcolate per tale portata, quindi per evitare fumate max 1A.

Gli ingressi sensore si possono collegare vari tipi di sensori purché siano da un range di +- 15 volt
alleghiamo datasheet dell’amplificatore operazionale.
Per quanto riguarda il microcontrollore abbiamo usato il 16f628A, alleghiamo datasheet.
Buzzer di segnalazione varie, come ricezione comando, avvio firmware ecc.
Led di segnalazione ingresso impulso e Led segnalazione ok impulso.
Transceiver HC12 con configurazione a 9600 bps alleghiamo datasheet.
E connettori di alimentazione con diodo di protezione, viene alimentato da un minimo di 7 volt, nella nostra configurazione abbiamo recuperato delle batterie da torcia e da portatili dismessi da 3,7v 4200 mAh Litio le potete recuperare praticamente ovunque, la tensione massima è di 15v.
Alleghiamo regolatore di tensione L7805ACD2T-TR.
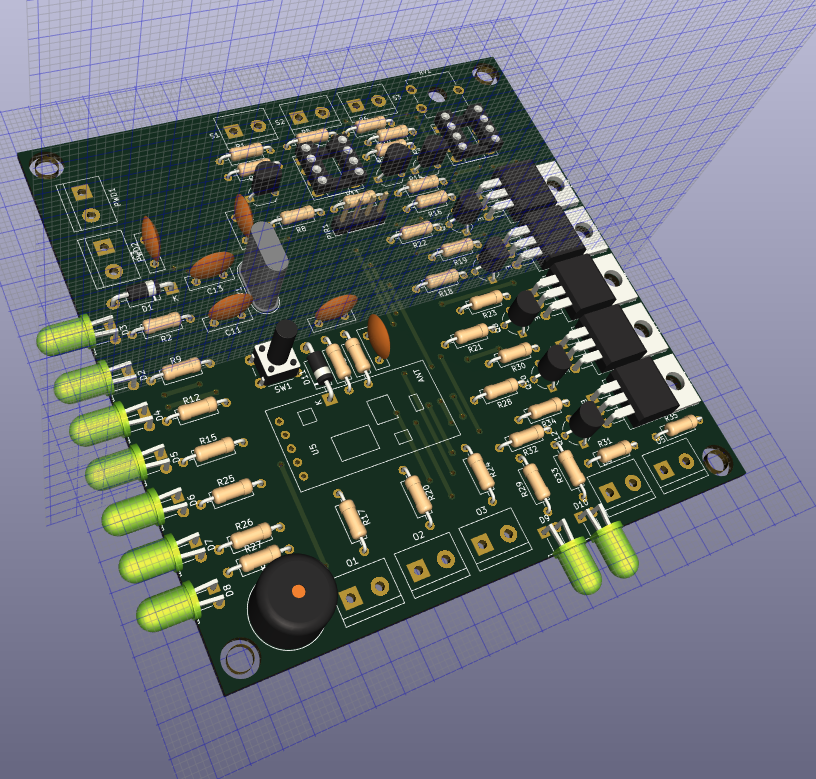
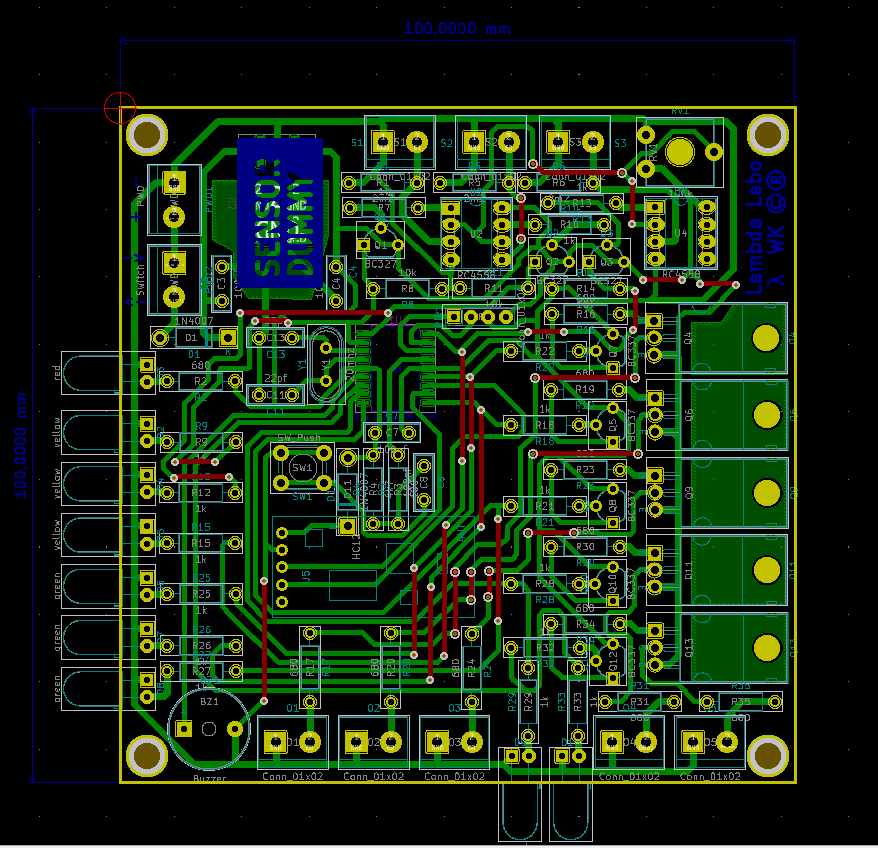
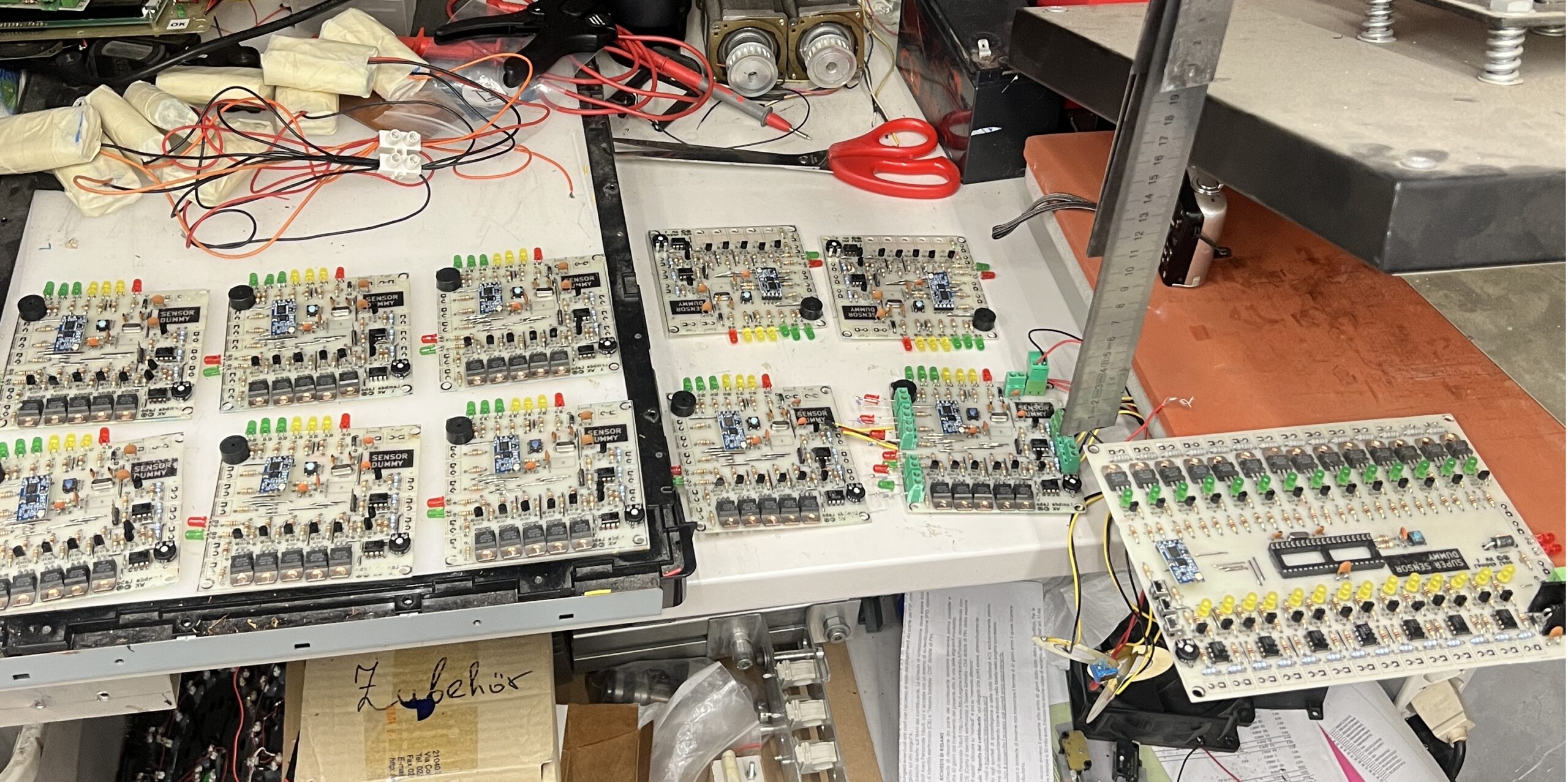
Detto questo Alleghiamo qualche foto del Dummy Sensor oltre agli schemi e firmware delle varie sagome.
Bene ora passiamo al contachilometri anche questo è molto simole all’originale anche se ho aggiunto delle opzioni con dei pulsanti per renderlo più interattivo per le nostre esigenze.
Qui il bom file
Ed ora qualche foto della realizzazione.


qui trovate il link della console
Ecco il link della fiera del Dummy Sensor